-

-
-
服务热线
0755-82029425 83680729 -
扫一扫
了解更多

-
服务热线
0755-82029425 83680729扫一扫
了解更多

解决方案
Description
毫米波雷达作为唯一可以“全天候全天时”工作的传感器,是实现汽车ADAS以及自动驾驶不可或缺的核心传感器之一!下面详细了解一下:
●●●毫米波雷达概念以及原理:
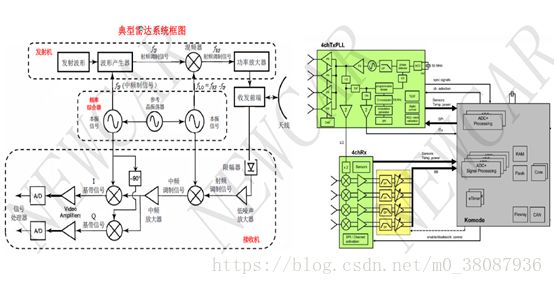
雷达(Radar,radio detecting and ranging),无线电探测和测距。雷达的基本任务是发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的探测感兴趣的距离、方向、速度等状态参数。按辐射种类可分为:脉冲雷达和连续波雷达(FMCW)。
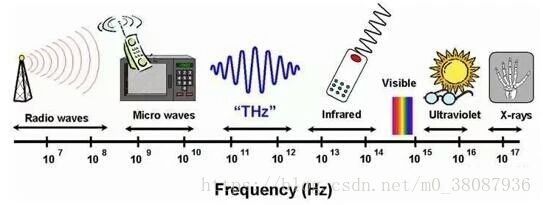
毫米波雷达,顾名思义,就是工作在毫米波频段的雷达。毫米波(Millimeter-Wave,缩写:MMW),是指长度在1~10mm的电磁波,对应的频率范围为30~300GHz。如下图,毫米波位于微波与远红外波相交叠的波长范围,所以毫米波兼有这两种波谱的优点,同时也有自己独特的性质。毫米波的理论和技术分别是微波向高频的延伸和光波向低频的发展。
根据波的传播理论,频率越高,波长越短,分辨率越高,穿透能力越强,但在传播过程的损耗也越大,传输距离越短;相对地,频率越低,波长越长,绕射能力越强,传输距离越远。所以与微波相比,毫米波的分辨率高、指向性好、抗干扰能力强和探测性能好。与红外相比,毫米波的大气衰减小、对烟雾灰尘具有更好的穿透性、受天气影响小。这些特质决定了毫米波雷达具有全天时全天候的工作能力。
●●●毫米波雷达检测原理:
毫米波雷达最重要的任务就是用无线电的方法发现目标并检测与目标物体的距离、速度和方向。
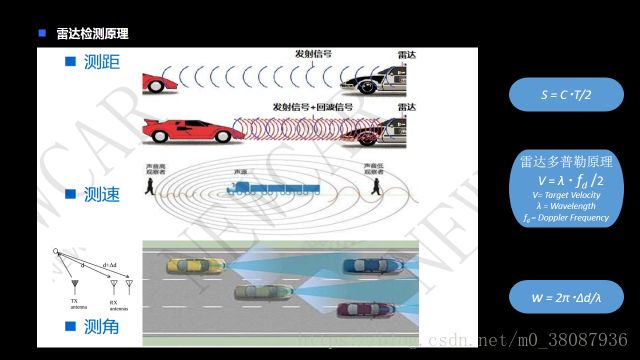
毫米波雷达测距原理很简单,就是把无线电波(毫米波)发出去,然后接收回波,根据收发的时间差测得目标的位置数据和相对距离。根据电磁波的传播速度,可以确定目标的距离公式为:s=ct/2,其中s为目标距离,t为电磁波从雷达发射出去到接收到目标回波的时间,c为光速。
毫米波雷达测速是基于多普勒效应(Doppler Effect)原理。所谓多普勒效应就是,当声音、光和无线电波等振动源与观测者以相对速度v运动时,观测者所收到的振动频率与振动源所发出的频率有不同。因为这一现象是奥地利科学家多普勒最早发现的,所以称之为多普勒效应。也就是说,当发射的电磁波和被探测目标有相对移动,回波的频率会和发射波的频率不同。当目标向雷达天线靠近时,反射信号频率将高于发射信号频率;反之,当目标远离天线而去时,反射信号频率将低于发射信号频率,如下图。由多普勒效应所形成的频率变化叫做多普勒频移,它与相对速度v成正比,与振动的频率成反比。如此,通过检测这个频率差,可以测得目标相对于雷达的移动速度,也就是目标与雷达的相对速度。根据发射脉冲和接收的时间差,可以测出目标的距离。

●●●毫米波雷达的产业研究:
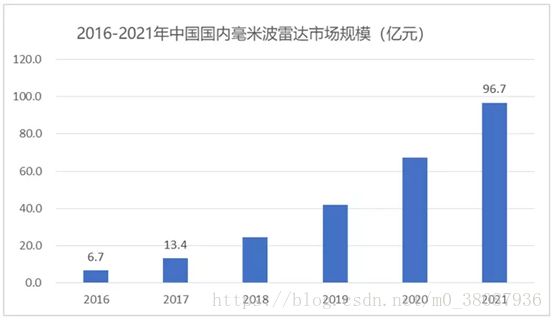
2017年中国毫米波雷达市场规模约为13.4亿元,到2021年预计能达到96.7亿元,2016-2021年均增长率约为70.6%。
2017年以来,激光雷达获得资本市场追捧。但从当前的市场来看,毫米波雷达才是增长最快的市场,2018年1-5月,中国乘用车车载毫米波雷达的前装市场装车量为140.6万颗,同比大增112.7%。
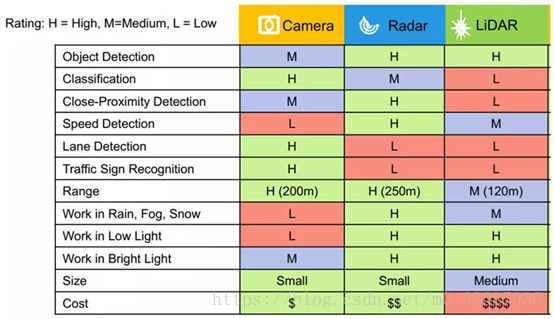
从下图的三大传感器对比来看,目前毫米波雷达的综合表现强于激光雷达。
毫米波雷达市场继续细分下去,24GHz毫米波雷达目前仍是出货量最大的类型。早期24GHz毫米波雷达主要用于中短距探测,77GHz毫米波雷达主要用于长距探测,随着技术进步与成本下降,加上性能优势,77GHz雷达有逐渐替代24GHz雷达的趋势,2017年用于LCA/RCTA的77GHz雷达出货量显著上升。
从总量上看,一方面目前侧边SRR 24GHz仍是主流,前视LRR部分主机厂如奔驰、PSA也使用24GHz雷达,短期内24GHz雷达增长依然可观;另一方面全球主流供应商如博世和大陆的下一代产品主要采用76-77GHz频段,预计到2020年左右,77GHz雷达市场规模将实现反超。
毫米波雷达市场仍是博世、大陆、海拉等传统TIER1掌控市场主要份额。国内毫米波雷达厂商从后装市场起步,然后通过国内车企,逐步进入前装市场。
木牛科技在后装市场已经获得数万台订单。森思泰克24Ghz侧后向雷达已经拿到自主品牌长丰猎豹的前装订单,到2019年预计有十余款新上市车型搭载森思泰克的毫米波雷达。
激光雷达成为国内外自动驾驶领域的创新热点,传统汽车巨头和初创企业都在该领域加大投入,投资并购频繁。技术方面,机械式多线激光雷达已经大量应用于无人驾驶原型车,但固态激光雷达更符合汽车量产需求,代表了未来发展方向。
目前,激光雷达仍存在技术路线不确定、价格高、难以满足车规级要求等问题。同时,下一代高精度成像毫米波雷达也在走向成熟,未来将与激光雷达形成一定竞争。
不过,激光雷达的技术进步神速,激光雷达厂商的信心越来越足。Quanergy联合创始人兼CEO Louay Eldada年初表示,2018年Quanergy将利用合作伙伴 Sensata 在江苏常州的工厂生产激光雷达,预计初期年产能为1000万台,后期随着市场需求的提升,该工厂产能有望逐步扩充至数亿台。
除了Quanery,速腾聚创、北科天绘、镭神智能、禾赛科技等国内激光雷达厂商也建立了自己的工厂,并在不断扩充产能。激光雷达市场预计在2021年启动大规模增长。
毫米波雷达、激光雷达和摄像头在尺寸、价格、适应场景、成像、测距、定位、物体识别等方面各有优劣,无论哪种单一传感器都无法独立支撑起未来自动驾驶汽车对外部环境感知的要求。雷达和摄像头的融合可以获得更为精确的环境数据、提升冗余,最大限度确保ADAS和自动驾驶系统的稳定性和安全性。
●●●毫米波雷达在ADAS中的应用:
对于车辆安全来说,最主要的判断依据就是两车之间的相对距离和相对速度信息,特别车辆在高速行驶中,如果两车的距离过近,是容易导致追尾事故。凭借出色的测距测速能力,毫米波雷达被广泛地应用在自适应巡航控制(ACC)、前向防撞报警(FCW)、盲点检测(BSD)、辅助停车(PA)、辅助变道(LCA)等汽车ADAS中。
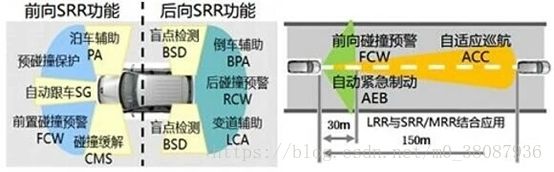
通常,为了满足不同距离范围的探测需要,一辆汽车上会安装多颗短程、中程和长程毫米波雷达。其中24GHz雷达系统主要实现近距离探测(SRR,60米以下),77GHz雷达系统主要实现中、长距离的探测(MRR,100米左右;LRR,200米以上)。不同的毫米波雷达“各司其职”,在车辆前方、车身和后方发挥不同的作用。

根据波的传播理论,频率越高,波长越短,分辨率越高,探测距离越远,但探测角度(水平视场)会变小。所以77GHz毫米波雷达较24GHz可以实现更远的探测距离,精度更高,不过随着频率的增加相应的芯片的设计和制造难度也变大,77GHz毫米波雷达成本更高。通常探测角度和探测距离是矛盾的。如图1,显示了大陆集团77GHz ARS 310型毫米波雷达在短、中、长程不同探测距离和探测角度的比较。所以虽然说77GHz功能上可以取代24GHz,是未来主流,但从性价比的角度来看,目前短程雷达还主要由24GHz承担。
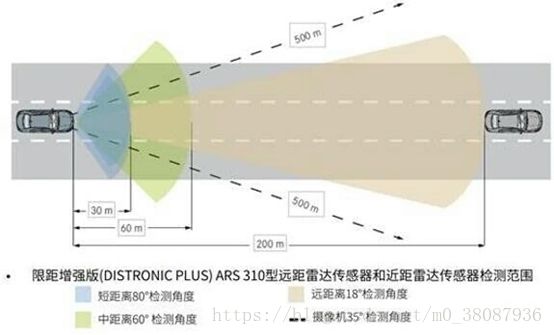
上图为大陆集团ARS 310型的短程、中程、长程雷达检测范围。想要完全实现ADAS各项功能,全方位覆盖汽车周围环境的感测,兼顾性能和成本,一辆汽车上会安装多颗短程、中程和长程毫米波雷达。不同的毫米波雷达“各司其职”,在车辆前方、车身和后方发挥不同的作用。目前主要的标配:1-2颗77GHz MRR/LRR+4颗24GHz SRR。24GHz SRR虽然探测距离相对较短,但优势在于探测角度较大,成本相对较低,可以配置多颗实现车身近距离全方位覆盖。MRR/LRR功能相当,LRR的优势在于它的可探测距离比较远,适用速度能达到250km/h,但在绝大部分有限速的国家,使用成本相对更低且适用速度在160km/h内的中距雷达来实现自适应巡航(ACC)功能更划算。

例如,奔驰S级就采用6颗毫米波雷达(1长+1中+4短),如上图,分别分布在前向双模长程毫米波雷达1颗,后向中远程毫米波雷达1颗,前/后保险杠左右短程雷达共4颗。“短程+中程+长程”毫米波雷达三者结合一起共同完成自适应巡航(ACC)、自动紧急制动(AEB)、前方/后方碰撞预警(FCW/BCW)、变道辅助(LCA)、盲点检测(BSD)、倒车辅助(BPA)、泊车辅助(PA)等多种ADAS功能。其中ACC、AEB、FCW、LCA作为汽车ADAS中最主要的防撞预警功能,是如何实现的?下面将详细介绍。
自适应巡航(ACC)
自适应巡航(Adaptive Cruise Control,ACC),是一种可以依据设定的车速或者距离跟随前方车辆行驶,或根据前车速度主动控制本车行驶速度,最终将车辆与前车保持在安全距离的驾驶辅助功能,该功能最大的优点是可以有效的解放驾驶者的双脚,提高驾驶的舒适性。
ACC的实现原理:在车辆行驶过程中,安装在车辆前部的毫米波雷达传感器持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC系统可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。ACC系统在控制车辆制动时,通常会将制动减速限制在不影响舒适度的程度,当需要更大的减速时,ACC系统会发出声、光预警信号通知驾驶者主动采取制动操作。
自动紧急制动(AEB)
自动紧急制动(Autonomous Emergency Braking,AEB),是一种汽车主动安全辅助功能。AEB系统利用毫米波雷达测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB系统也会启动,使汽车自动制动,从而确保驾驶安全。

据研究表明,90%的交通事故是由于驾驶者的注意力不集中而引起的,AEB技术能在现实世界中减少38%的追尾碰撞,且无论是在城市道路(限速60km/h)或郊区道路行驶的情况下,效果都显著。所以,欧洲新车安全评鉴协会(Euro NCAP)在2014年率先将AEB系统纳入整体安全评级中,而我国也在2018年将AEB加入了NCAP评分体系。
前方防撞预警功能(FCW)
前方防撞预警(Forward Collision Warning,FCW),通过毫米波雷达和前置摄像头不断监测前方的车辆,判断本车与前车之间的距离、方位及相对速度,探测到前方潜在的碰撞危险,当驾驶员没有采取制动措施时,仪表会显示报警信息并伴随声音报警,警告驾驶员务必采取应对措施。当判断到事故即将发生时,系统会让刹车自动介入工作,从而避免事故发生或降低事故可能造成的风险。

AEB通过传感器探测前方的车辆、行人等障碍物,如果发现距离过近且存在碰撞风险时,进行自动制动。FCW则可以理解为进行自动制动之前的预警功能。其实,FCW和AEB系统是相辅相成的关系,目的都是在行车时避免或减少碰撞事故的发生。
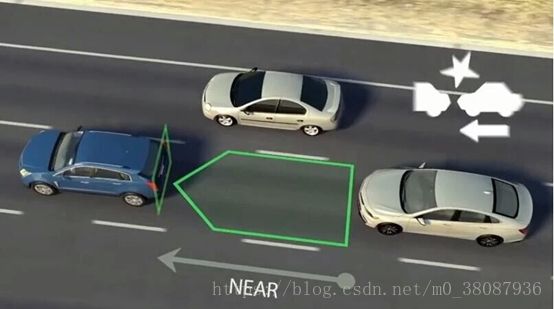
变道辅助(LCA)
变道辅助(lane change assist,LCA),是通过毫米波雷达、摄像头等传感器,对车辆相邻两侧车道及后方进行探测,获取车辆侧方及后方物体的运动信息,并结合当前车辆的状态进行判断,最终以声、光等方式提醒驾驶员,让驾驶员掌握最佳变道时机,防止变道引发的交通事故,同时对后方碰撞也有比较好的预防作用。
变道辅助系统包括“盲点检测(BSD)”、“变道预警(LCA)”、“后碰预警(RCW)”3个功能。可以有效地防止变道、转弯、后方追尾等交通事故的发生,极大提升汽车变道操作的安全性能。
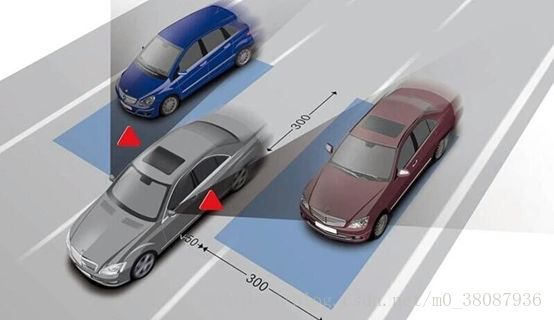
其中,BSD根据其判断的移动物体所处的相对位置及与本车的相对速度,当处于本车的盲区范围内,及时提醒驾驶员注意变道出现的风险。LCA检测目标车辆在相邻的区域以较大的相对速度靠近本车,在两车时距小于一定范围内时,通过声、光等方式提醒驾驶员。RCW检测到同一车道后方有快速接近的移动物体,并有碰撞风险时,及时通过声、光等方式,预警驾驶员系好安全带等方式减小碰撞带来的伤害。
多种传感器融合
其实在这些驾驶辅助功能实现的过程中,我们不难发现虽然毫米波雷达起到了最核心的物体探测、测距和测速的作用,但是整个过程还需要其它传感器的辅助,比如激光雷达、摄像头、超声波雷达、惯性传感器等。随着越来越多汽车厂商开始将不同的传感器整合到汽车ADAS中,业界普遍认为“传感器融合(sensor fusion)”是高度自动化驾驶安全性的关键。
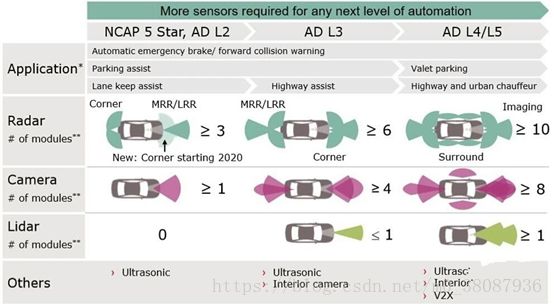
在环境感知中,每一种传感器都有独特的优势和弱点。例如,毫米波雷达不受天气影响可全天候全天时工作,但分辨率不高,不能区分人和物;而摄像头有更高的分辨率,能够感知颜色,但受强光影响较大;激光雷达则能够提供三维尺度感知信息,对环境的重构能力强,但受天气影响大。传感器各有优劣,难以互相替代,未来要实现自动驾驶,是一定需要多种传感器相互配合共同构成汽车的感知系统。如图7,随着自动驾驶从L2级朝L5级自动驾驶发展,集成在汽车上传感器数量和种类不断增加,只有这样才能够保证信息获取充分且有冗余,才能达到OEM主机厂所需的安全标准。
软件是多种传感器融合的核心之一。算法是多传感器融合通往更高级自动驾驶技术的“拦路虎”,因为多种传感器的使用会使需要处理的信息量大增,这其中甚至有相互矛盾的信息,如何保证系统快速地处理数据,过滤无用、错误信息,从而保证系统最终做出及时正确的决策十分关键。目前多种传感器融合的理论方法有贝叶斯准则法、卡尔曼滤波法、D-S证据理论法、模糊集理论法、人工神经网络法等。
因此,在使用多种传感器的情况下,要想保证安全性,就必须对传感器进行信息融合。多传感器融合可显著提高系统的冗余度和容错性,从而保证决策的快速性和正确性,是现阶段ADAS走向高级自动驾驶并最终实现无人驾驶的必然趋势。
●●●毫米波雷达其它应用以及发展趋势:
毫米波雷达除了汽车ADAS应用,还在无人机、安防、智能交通、工业以及军用领域发挥着非常重要的作用。
• 无人机:主要应用体现在定高和避障两个方面。
• 安防:主要应用在一些重要的区域的安全警戒。
• 智能交通:主要应用于车辆检测、交通量调查、交通事件检测、交通诱导、超速监测、电子卡口、电子警察和红绿灯控制等。
• 工业:主要应用于工业液位计、挖掘机、重型推土机、高压电线塔附近安全施工、生产安全监测等。
• 军用:主要应用于雷达探测、导弹制导、卫星遥感、电子对抗等。
综上分析,毫米波雷达技术的发展趋势是朝着体积更小、功耗更低、集成度更高和多项技术共存融合(性价比更高)方向发展。
从频段上,由于77GHz比24GHz具有更小的波长,可进一步缩减天线尺寸,更便于安装部署。同时77GHz频段带宽更大、探测距离更远、精度更高,正逐渐成为主流。不过24GHz在短程BSD/LCA等应用成本优势明显,将长期与77GHz互补共存。
在前端收发组件,高集成化的MMIC成为了主流,在工艺上先是SiGe替代了GaAs,当前正慢慢朝CMOS方向发展。由于GaAs、SiGe和CMOS各有优缺点,在超高速、超高频领域,CMOS目前还是比不上GaAs,市场上同时对于几种工艺都有需求。
对于汽车应用来说,不仅要考虑毫米波雷达前端的集成,与其它传感器的融合,还要考量与主处理器的“合作”,到底是集成还是分立,还是需灵活折中?从产品趋势来看,一种是传感器本身的融合或高度集成,如将毫米波雷达前端与摄像头等其它传感器集成;另一种是单芯片系统方案,即“多传感器+主处理器+数字信号处理器”,未来的争夺战也将围绕这两方面展开,当然性价比是前提。在市场需求层面,既需要有雷达前端集成芯片,亦需要单芯片系统方案,以满足客户的差异化需求。
总之,上述技术发展最终结果是要实现“更小巧、更便宜、更智能”的毫米波雷达,为ADAS、自动驾驶和终极的无人驾驶服务!
毫米波雷达 ARS404-21")





